-
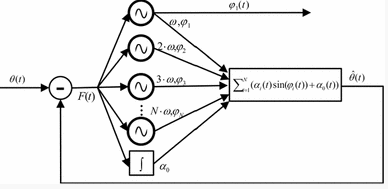 An oscillator-based smooth real-time estimate of gait phase for wearable roboticsAutonomous Robots, March 2017, Volume 41, Issue 3, pp 759–774
An oscillator-based smooth real-time estimate of gait phase for wearable roboticsAutonomous Robots, March 2017, Volume 41, Issue 3, pp 759–774 -
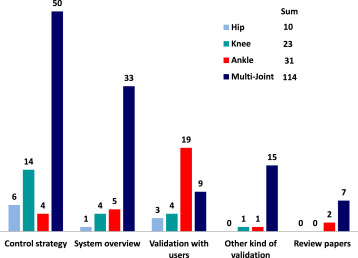 Review of assistive strategies in powered lower-limb orthoses and exoskeletonsRobotics and Autonomous Systems, Volume 64, February 2015, Pages 120–136
Review of assistive strategies in powered lower-limb orthoses and exoskeletonsRobotics and Autonomous Systems, Volume 64, February 2015, Pages 120–136 -
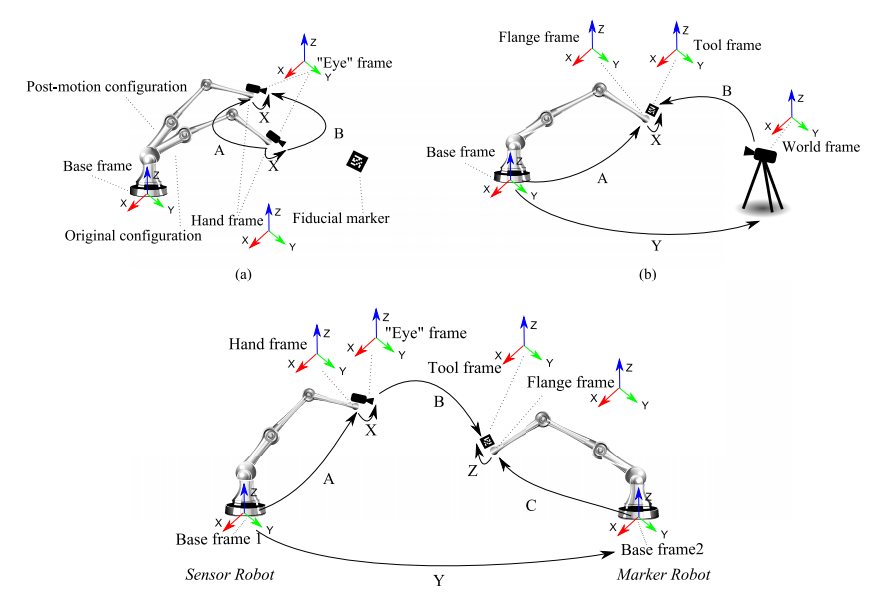
 Towards Simultaneous Coordinate Calibrations for Cooperative Multiple Robots2014 IEEE/RSJ International Conference on Intelligent Robots and Systems
Towards Simultaneous Coordinate Calibrations for Cooperative Multiple Robots2014 IEEE/RSJ International Conference on Intelligent Robots and Systems -
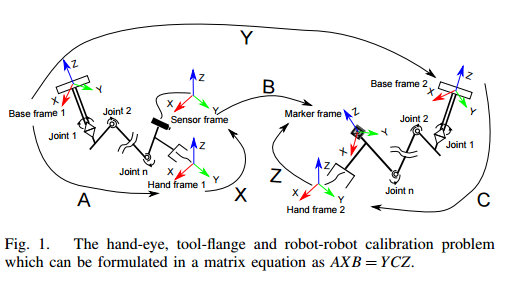
 Simultaneous Hand–Eye, Tool–Flange,and Robot–Robot Calibration for Comanipulation by Solving the AXB = YCZ ProblemIEEE TRANSACTIONS ON ROBOTICS, VOL. 32, NO. 2, APRIL 2016
Simultaneous Hand–Eye, Tool–Flange,and Robot–Robot Calibration for Comanipulation by Solving the AXB = YCZ ProblemIEEE TRANSACTIONS ON ROBOTICS, VOL. 32, NO. 2, APRIL 2016 -
 Improving RGB-D SLAM in dynamic environments: A motion removal approachRobotics and Autonomous Systems, vol. 89, pp. 110-122, 2017. PDF
Improving RGB-D SLAM in dynamic environments: A motion removal approachRobotics and Autonomous Systems, vol. 89, pp. 110-122, 2017. PDF -
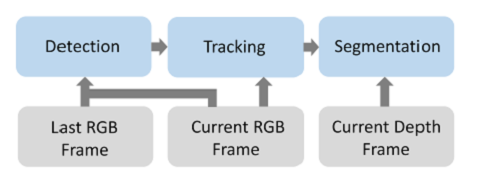
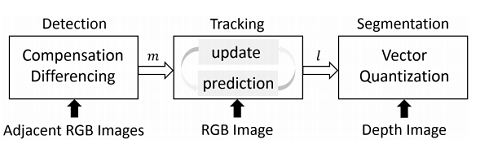 Motion removal from moving platforms: An RGB-D data-based motion detection, tracking and segmentation approachin 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2015, pp. 1377-1382.
Motion removal from moving platforms: An RGB-D data-based motion detection, tracking and segmentation approachin 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2015, pp. 1377-1382. -
 Multiple moving objects tracking for automated visual surveillancein Information and Automation (ICIA), 2015 IEEE International Conference on, 2015, pp. 1617-1621.
Multiple moving objects tracking for automated visual surveillancein Information and Automation (ICIA), 2015 IEEE International Conference on, 2015, pp. 1617-1621. -
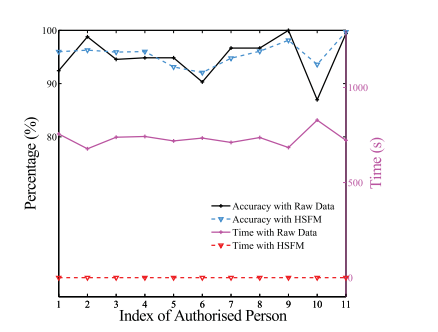 Person Verification based on Skeleton Biometrics by RGB-D CameraIn Robotics and Biomimetics (ROBIO), 2014 IEEE International Conference on, , pp. 671-676. IEEE, 2014
Person Verification based on Skeleton Biometrics by RGB-D CameraIn Robotics and Biomimetics (ROBIO), 2014 IEEE International Conference on, , pp. 671-676. IEEE, 2014 -
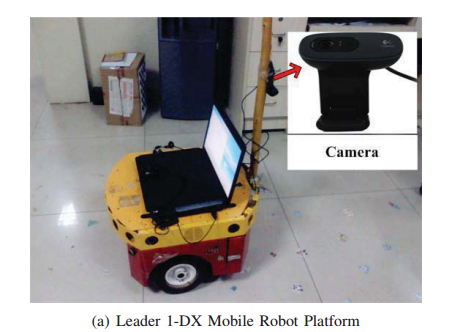 A vision-based mobile robot localization methodIn Robotics and Biomimetics (ROBIO), 2013 IEEE International Conference on, pp. 2703-2708. IEEE, 2013.
A vision-based mobile robot localization methodIn Robotics and Biomimetics (ROBIO), 2013 IEEE International Conference on, pp. 2703-2708. IEEE, 2013. Accuracy assessment of an N-ocular motion capture system for surgical tool tip tracking using pivot calibrationInformation and Automation (ICIA), 2016 IEEE International Conference on, pp.1639-1634. IEEE ,2016
Accuracy assessment of an N-ocular motion capture system for surgical tool tip tracking using pivot calibrationInformation and Automation (ICIA), 2016 IEEE International Conference on, pp.1639-1634. IEEE ,2016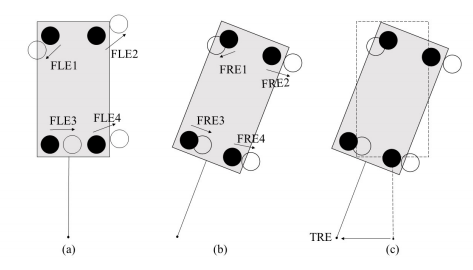 Estimation of target registration error considering small inhomogeneous and anisotropic bias in fiducial localizer errorRobotics and Biomimetics (ROBIO), 2016 IEEE International Conference on,pp. 62-67. IEEE,2016
Estimation of target registration error considering small inhomogeneous and anisotropic bias in fiducial localizer errorRobotics and Biomimetics (ROBIO), 2016 IEEE International Conference on,pp. 62-67. IEEE,2016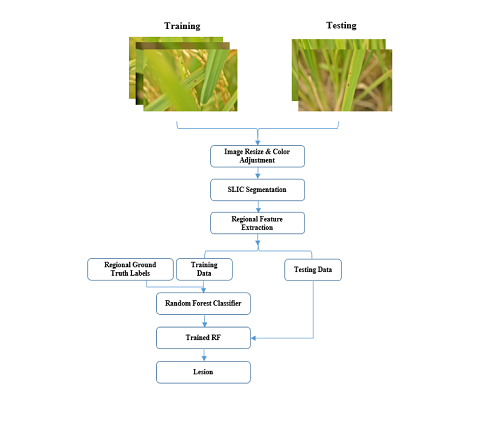 Automatic Lesion Segmentation from Rice Leaf Blast Field Images based on Random ForestIn Real-time Computing and Robotics (RCAR), IEEE International Conference on, pp. 255-259. IEEE, 2016.
Automatic Lesion Segmentation from Rice Leaf Blast Field Images based on Random ForestIn Real-time Computing and Robotics (RCAR), IEEE International Conference on, pp. 255-259. IEEE, 2016.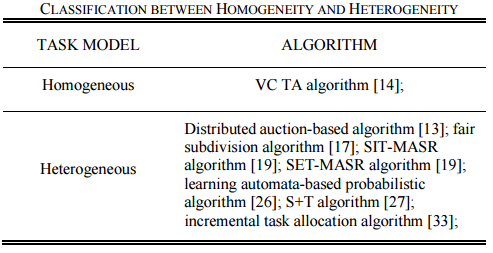 A survey and analysis of task allocation algorithms in multi-robot systems2013 IEEE International Conference on Robotics and Biomimetics (ROBIO)
A survey and analysis of task allocation algorithms in multi-robot systems2013 IEEE International Conference on Robotics and Biomimetics (ROBIO)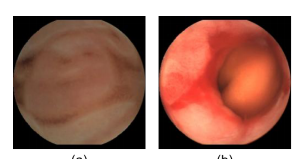 A deep convolutional neural network for bleeding detection in Wireless Capsule Endoscopy images2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC)
A deep convolutional neural network for bleeding detection in Wireless Capsule Endoscopy images2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC)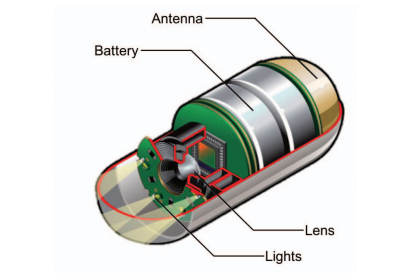 GI bleeding detection in wireless capsule endoscopy images based on pattern recognition and a MapReduce framework2016 IEEE International Conference on Real-time Computing and Robotics (RCAR)
GI bleeding detection in wireless capsule endoscopy images based on pattern recognition and a MapReduce framework2016 IEEE International Conference on Real-time Computing and Robotics (RCAR)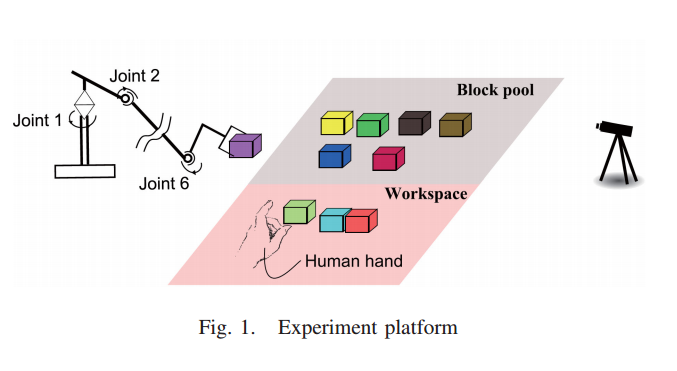 Human robot cooperation based on human intention inferenceRobotics and Biomimetics (ROBIO), 2014 IEEE International Conference on.
Human robot cooperation based on human intention inferenceRobotics and Biomimetics (ROBIO), 2014 IEEE International Conference on.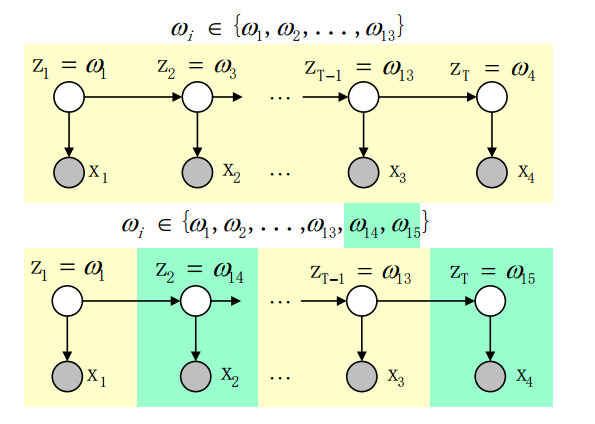 Evolving hidden Markov model based human intention learning and inferenceRobotics and Biomimetics (ROBIO), 2015 IEEE International Conference on.
Evolving hidden Markov model based human intention learning and inferenceRobotics and Biomimetics (ROBIO), 2015 IEEE International Conference on.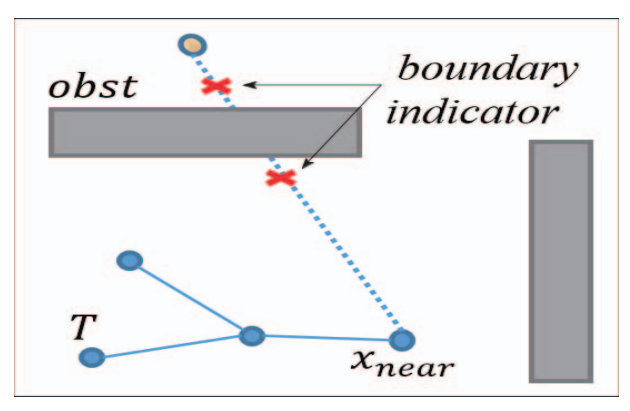 Variant step size RRT: An efficient path planner for UAV in complex environmentsIn Real-time Computing and Robotics (RCAR), IEEE International Conference on, pp. 255-259. IEEE, 2016.
Variant step size RRT: An efficient path planner for UAV in complex environmentsIn Real-time Computing and Robotics (RCAR), IEEE International Conference on, pp. 255-259. IEEE, 2016.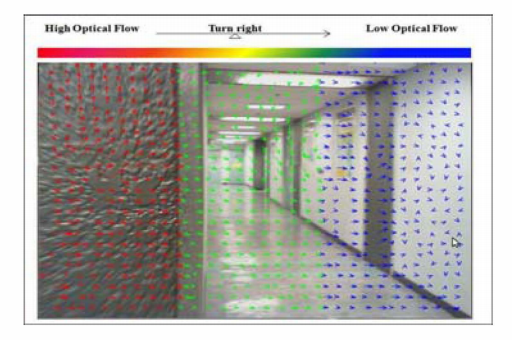 Obstacle Avoidance for Quadrotor Using Improved Method Based on Optical flow2015 IEEE International Conference on Information and Automation .
Obstacle Avoidance for Quadrotor Using Improved Method Based on Optical flow2015 IEEE International Conference on Information and Automation .
